Helping elevate Skippy Scout to best in field
Discover how it took smart minds to solve complex AgriTech challenges.
Surveying farmers’ fields is an important job. It enables farmers to monitor and then take preventative or retroactive action to maintain the health of their valuable crops. However, walking their fields to visually ‘scout’ crops is time-consuming and inefficient. Employing a crop consultant to do this for farmers can be expensive. AgriTech provided an innovative alternative solution.
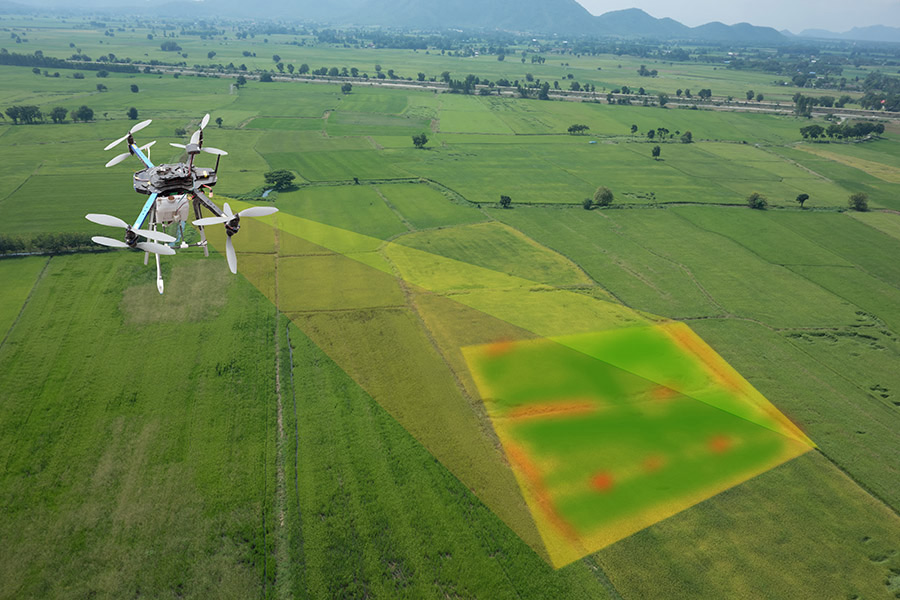
In 2018, we were approached by Jack Wrangham – Director of UK-based start-up Drone AG. Brought up on a farm in the North of England, Jack went on to fly drones professionally. Combining these two areas of expertise, he envisioned and created a product called Skippy Scout. Skippy Scout is an app that enables farmers to control a domestic drone to survey crops, taking photographs at multiple scout points in each field.
Accessible to all
Drone AG’s strategy was to make rapid, accurate and cost-effective crop surveying accessible to every arable farm, of any size, worldwide. Farmers could buy a DJI drone, subscribe to Skippy Scout for a moderate monthly fee and then scout their own fields as and when they needed.
Piloted and proven
Drone AG came to AVAMAE with a Beta version of their native phone/tablet app that they were piloting with a number of farms across the UK, Australia, USA and Europe. This drone control software let farmers mark out their field in the app and dictate where they wanted their drone to scout. The drone would fly out and descend to 2-metres above the crop and take images at each of the marked scout points. But this beta version was not part of a cloud-based system, purely an independent app, that was developed for the purpose of testing the idea and proving that the core parts the system could work. Once the Drone AG team had done this, it was time to enhance the offering by building out the software to enterprise standards for a global launch.
Better the beta
Now Drone AG had established a model that worked, they realised to truly access the commercial value of Skippy Scout, they needed to enhance the system to a cloud software driven, fully functional SaaS platform.
Our role was to design and build the central cloud software behind the system, that stored all the information centrally that the app needed to fully control the drone and receive the raw scout point images captured during the flights for processing and dissemination, while collaborating with a separate team of specialist drone app engineers, to make sure the whole system worked in harmony.

Multiple APIs
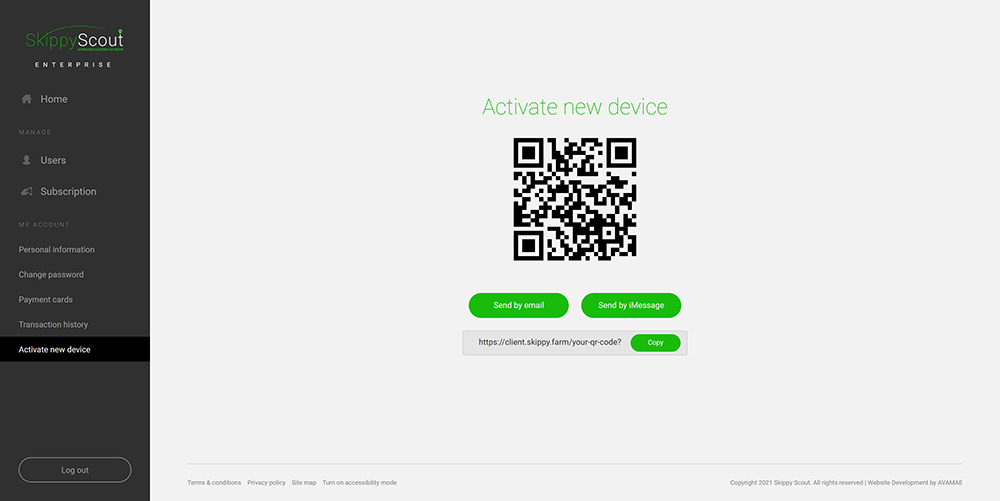
We got cracking on the project back in the summer of 2018, and after all the initial system architecture was agreed, we set to work creating the APIs for the app to send data back and forth to the central cloud application platform. The API endpoints and cloud infrastructure were built in a scalable and secure way using AKS – Microsoft Azure IaaS using Kubernetes containerisation – which provided the scaling and security we needed. Mirroring all the app data to the cloud meant that it was also possible for the app data to be restored to other devices if the farmer lost or broke their device or simply wanted to work off multiple devices.
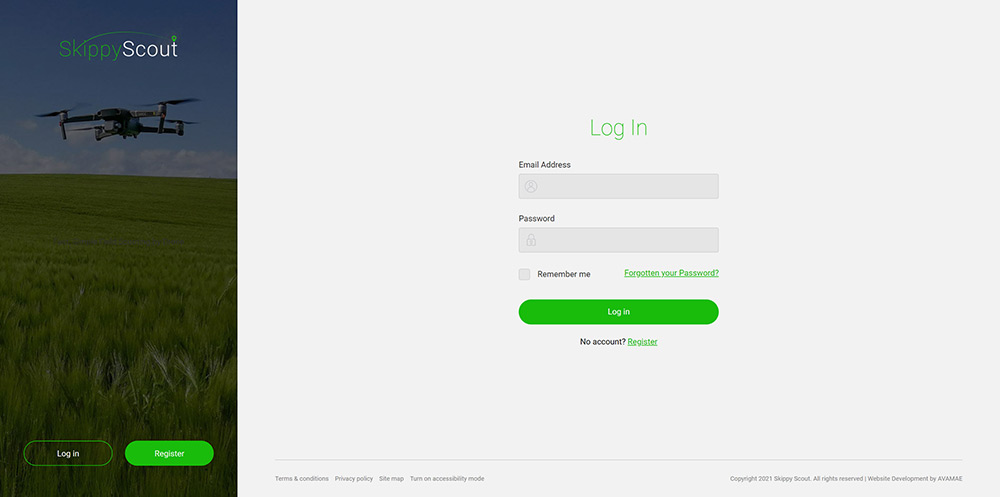
Web Interfaces
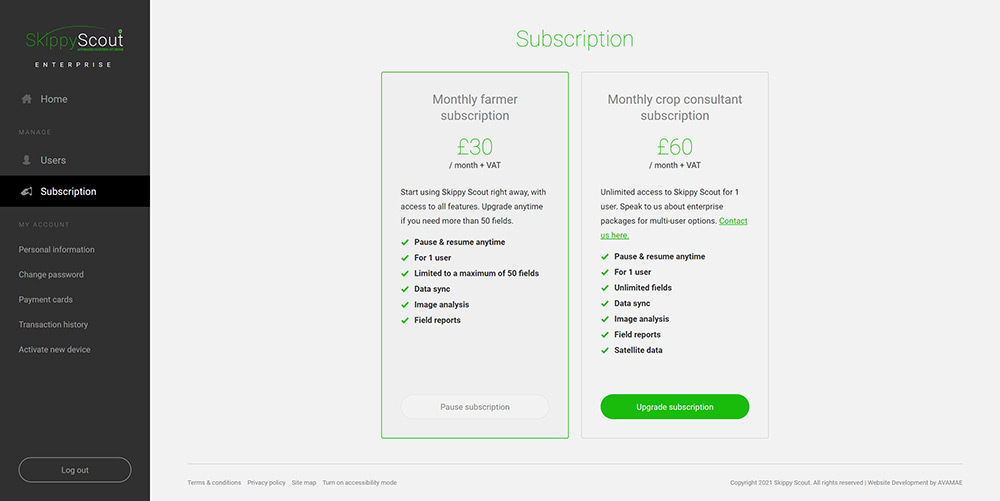
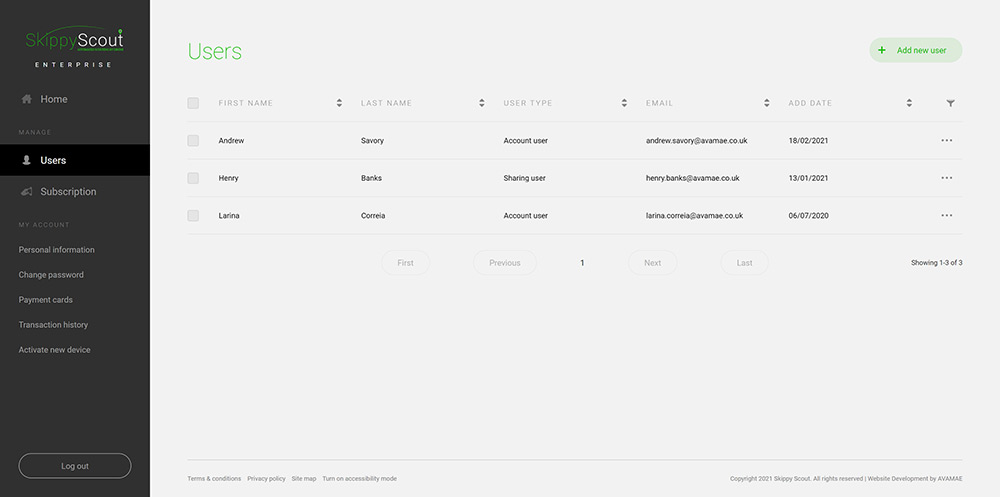
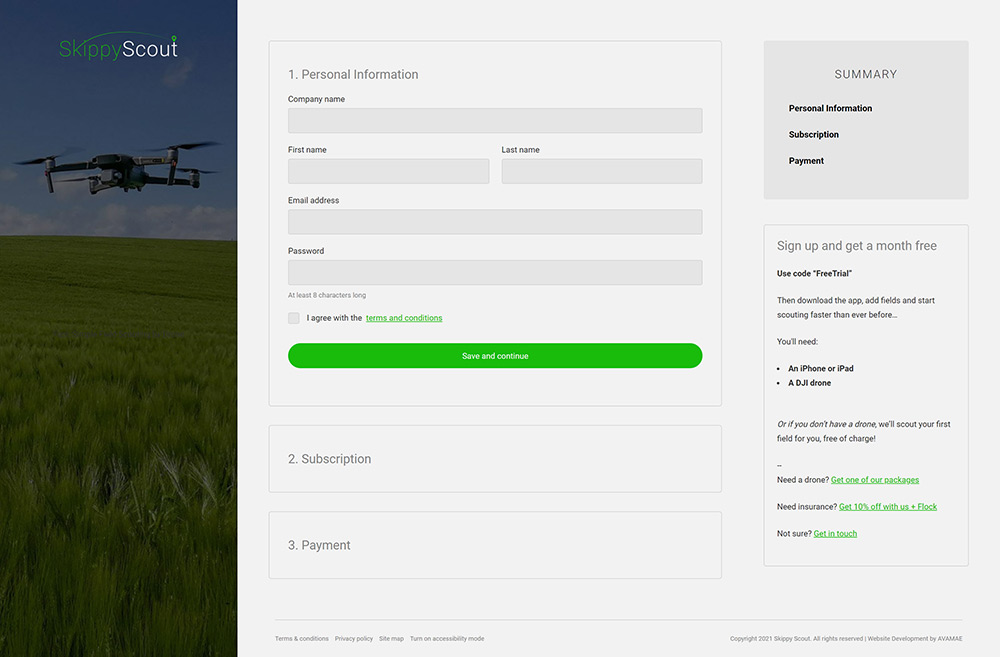
Following on from the core build we started building all the components for the web interface to enable farmers to sign up, choose their subscription, make payment and to log in to see and share their data with colleagues and third parties. We also designed and built the admin interfaces that allow Drone AG to manage the farmers using the system and to see drone usage, flight plans being used and any errors logged during flights.

Third party integrations
In order for the whole system to function correctly, we also needed to provide the Skippy Scout app with considerable environmental data only available from specialist third-party data sources.
A terrain data integration helps the flight planning software prevent the drone from crashing. It delivers important terrain data, with a high resolution, such as hillshades, elevation contours and landcover data.
Another integration provides essential hazard data including powerlines, trees, buildings, upper flight envelope boundaries (no fly areas) of airports or military areas. And another integration that we drew upon provides accurate field boundaries and details of the current crop planted in it.
Finally, a Stripe integration allows the platform to take monthly subscription payments and initially provided access to billing information and invoices, although after launch this functionality was brought within the SaaS application itself.
These third-party integrations, combined with considerable heavy-duty maths and manipulation, have allowed us to create the final cloud platform SaaS solution.
Successful launch
Skippy Scout went live in 2019 to subscription paying farmers and has been warmly welcomed by its users. The uniqueness and disruptive nature of the completed product has lead to Drone AG receiving a lot of positive coverage in the industry press and associated media.
We were delighted to be involved in this AgriTech project and play our part in helping Drone AG get Skippy Scout to market.

Ongoing Product Development
After the initial launch, we continued to make additions and refinements to Skippy Scout, adding and adapting software features to fine tune the initial product. After discussions with Drone AG about their need for continuous innovation and enhancements, and their technology roadmap that plotted the development of the project several years into the future, we agreed that an AVAMAE Product Development As A Service (PDaaS) package was the best way forward. We now provide Drone AG with a dedicated number of engineering days each month in multiple disciplines to continue assisting them on their exciting journey.
New innovations
As part of our PDaaS package we started to develop more advanced flight planning functionality for Skippy Scout that would be computed in the cloud pre-flight.
Having an accurate, efficient, and safe flight plan is the core of this project. For the drones to autonomously visit the scout points marked in the field, they need to determine the best path between sequential points, working out a route that minimises travel time. This is especially important as drones have a limited battery life of around 30 minutes and some fields can be very large.
To do this, we split the space into flyable and non-flyable areas in 3D space. Then a route-finding algorithm was employed to determine the most efficient order in which the drone should visit the scout points before a pathfinding algorithm determined which cubes the drone should pass through whilst moving between the scout points.
Flight and trajectory planning between the scout points gives smooth arcs of flight. An efficient, well planned route, especially for surveying large fields, means that the drone can complete all inspection points without having to return for time-consuming recharging.
As well as developing and testing the new flight planning methods, we continue to make many enhancements to Skippy Scout as part of our PDaaS package (many of which we can’t reveal here), including:
- AI analysis on the images taken by the drone to measure leaf count and stone coverage and to gauge the health of crops
- Integration of additional third-party providers, including satellite imagery to give readings on the Normalized Difference Vegetation Index (NDVI) for the crops and prove richer overlays on the field reports
Looking ahead, there are also numerous new and exciting improvements to come.

Harmonious collaboration
Our working relationship with Drone AG is strong and ongoing as we continue to develop exciting new features and improvements. We’re always happy to work in collaboration with other innovative tech companies, combining our individual specialisms, creativity and experience to build industry-leading software that makes a difference.